Rapid Mapping of Small-Scale River-Floodplain Environments Using UAV SfM Supports Classical Theory
Abstract
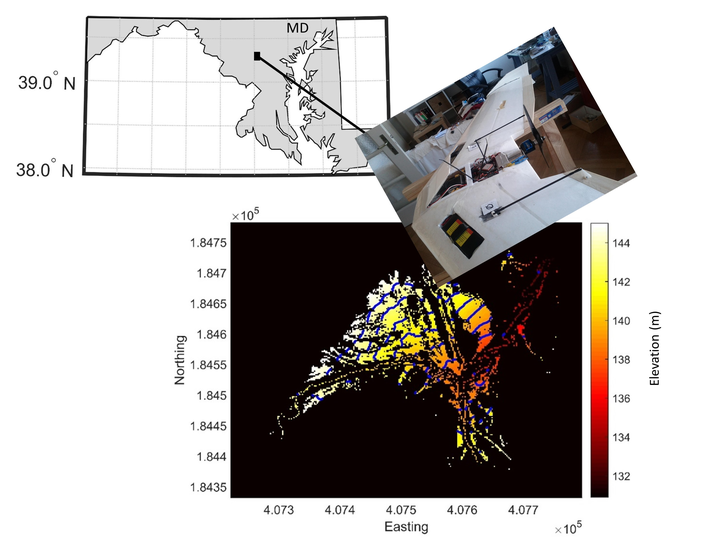
Unmanned Aerial Vehicle (UAV) platforms have rapidly developed as tools for remote mapping at very high spatial resolutions. They have recently gained in popularity in many application fields owing to the versatility of platforms and sensors, ease of deployment, and a steady increase in computational power. Obtaining highly detailed topography data over very small scales is one of the more typical application domains. Here, we demonstrate this application using Structure from Motion (SfM) processing over a small river floodplain in Howard County (Maryland, USA). Evaluation of the derived bare-earth terrain model with state-of-the art LiDAR shows a trivial bias of 1.6 cm and a root mean square deviation (RMSD) of 39 cm. We then applied this terrain model to extract floodplain and river cross-section geometries of a small stream, important during high-magnitude urban flash flood events, with the aim to assess its value for floodplain inundation mapping and first order characterization of in-channel hydraulics. Initial findings agree with traditional stream and floodplain classification theory and thus show very promising results for this type of UAV usage. We expect this type of application to gain more momentum in the near future with the ever-growing importance of more detailed data in order to increase resilience to flood risk, especially in urban areas.